Le but de cette initiation est d'apprendre les bases de
la programmation du robot en quelques heures. Pour arriver au plus
vite au cœur du sujet, nous avons construit les modèles au
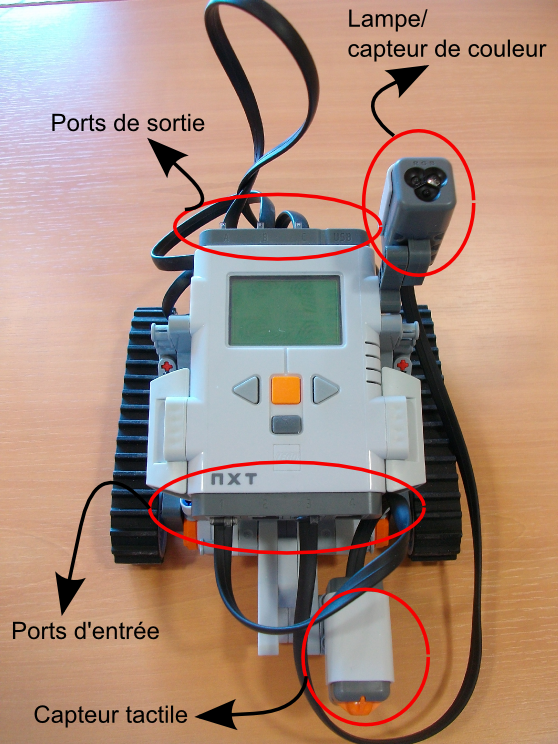
préalable. Vous disposez ainsi d'un robot "standard" composé des éléments suivants :
Il y a aussi, de l'autre côté de la brique, trois sorties, notées A, B et C qui permettent au robot d'agir. Sur le modèle que nous vous avons préparé, ces trois sorties sont connectées aux trois moteurs : les moteurs B et C commandent les roues (ou les chenilles). Le moteur connecté sur A est là pour faire beau.
A côté de la sortie C se trouve l'entrée USB qui permet de connecter le robot au PC. C'est par cet intermédiaire que les programmes, développés sur le PC, seront transmis au robot. On pourra alors déconnecter le robot du PC, et le faire évoluer de façon autonome.
Sur le devant de la brique se trouve un écran qui permet d'une part de naviguer dans différents menus et de contrôler le robot, d'autre part d'afficher différents messages pendant l'exécution d'un programme.
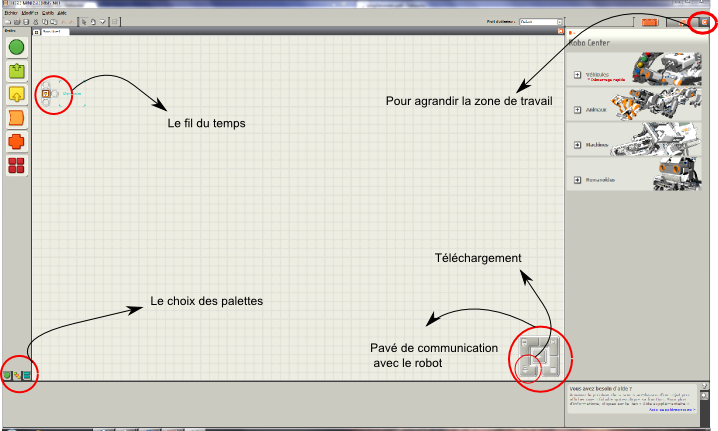
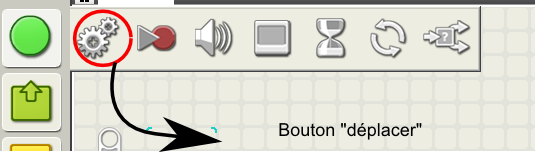
Lancez le programme de l'interface de développement, en cliquant sur son icône. Vous obtenez
l'écran de la figure ci-dessous. Pour avoir une zone de travail plus grande, cliquez sur la croix entourée, en haut à droite de la figure.
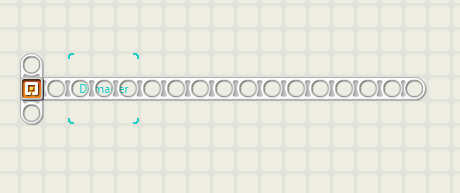
La programmation du robot se fait en plaçant des blocs de commandes
sur une sorte de fil du temps. Quand le robot voudra exécuter
le programme qu'on y aura enregistré, il effectuera chacune des
commandes l'une après l'autre en les lisant de la gauche vers la
droite. La figure ci-dessous vous montre le fil du temps,
obtenu en cliquant-tirant sur le plot originel.
Les blocs de commandes se trouvent dans le menu de gauche. Il y a
trois palettes disponibles :
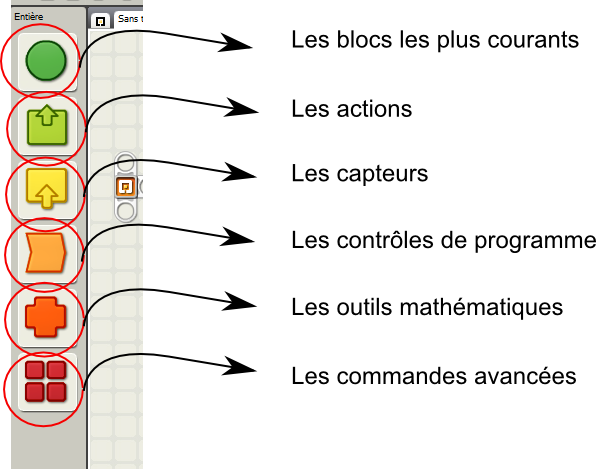
- la palette des commandes courantes (l'onglet représenté par un rond vert en bas à gauche de l'écran).
- la palette complète (l'onglet avec les trois petits carrés de couleurs différentes en bas à gauche).
- les blocs construits par l'utilisateur ou bien téléchargés (l'onglet représenté par les deux barres bleues en bas à droite).
Nous nous servirons de la palette complète. Celle-ci comprend six boutons regroupant les commandes de même type :
Un premier programme
Programmer
Le premier programme sera très simple : nous allons demander au
robot d'avancer tout droit pendant 2 secondes, puis de tourner pendant
2 secondes.
Il faut placer deux blocs
déplacer sur
le
fil du temps. Ils sont disponibles dans la première boîte à outils :
Le premier bloc devra commandera d'aller tout droit pendant 2 secondes, et
le bloc suivant lui ordonnera de tourner pendant 5 secondes.
La première chose à faire est de placer les deux blocs sur le fil du
temps (facile !). Il faut ensuite fixer les paramètres de chacun
des blocs.
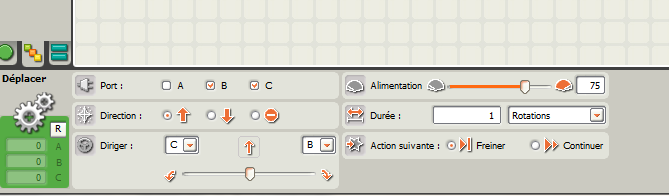
Cliquez sur le premier bloc, ce qui le rend actif et affiche une série
de six fenêtres en bas à gauche de l'écran suivant :
Vous pouvez y rentrer les informations suivantes :
- Port : indique quels sont les moteurs concernés (ici, c'est B et C : s'ils ne sont pas cochés, faites-le).
- Direction : Avant, Arrière ou Arrêt : le sens de la marche (on choisit Avant).
- Diriger : permet de faire tourner les
robot.
- Alimentation : permet de régler la puissance des moteurs.
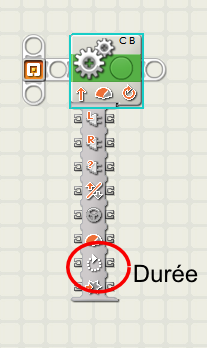
- Durée : fixez-la à cinq secondes (l'unité
utilisée est à choisir dans le menu ouvert à l'aide de la flèche à
droite de cette fenêtre).
- Action suivante : indiquer si l'on veut que le
robot continue en roue libre, ou bien s'arrête brusquement. Ce n'est
pas très important pour nos exemples, vous n'avez qu'à essayer les
deux pour voir la différence.
Réglez les paramètres pour que le robot
ait le comportement décrit au début du paragraphe.
Charger le programme sur le robot
- Sauvegardez votre travail (Fichier ->
enregistrez sous)
- Connectez
le robot au port USB et allumez-le (bouton orange sur la
brique)
- Chargez votre programme dans le robot :
- utilisez la touche en
bas à gauche du pavé de communication
(voir l'interface de développement).
- Une
fenêtre s'ouvre au milieu de l'écran pour vous
informer de l'état d'avancement du chargement. Si tout s'est bien
passé, le programme est maintenant chargé dans le robot, vous pouvez
débrancher le câble USB.
Tester
- Sur la brique, à l'aide du bouton orange, sélectionnez My
Files puis Software Files (les programmes que
vous avez chargés), puis le nom du programme que vous avez
sauvegardé.
-
Appuyez sur le bouton orange encore une fois (Run) : ça
y est, c'est parti.
Pas très impressionnant, seulement 4 secondes de
fonctionnement... Mais c'est un début.
Tourner en rond
... mais si on lui demande de répéter ce comportement à l'infini,
on obtient un robot qui tourne en rond sans s'arrêter, ce qui est
déjà un peu mieux. Comment faire ?
- Commencez un nouveau projet.
- Allez chercher la boucle dans le
sous-menu Commun (l'avant-dernière icône), et
positionnez-la sur le fil du temps.
Toutes les commandes figurant à l'intérieur de cette boucle seront
exécutées de gauche à droite. Lorsque le robot aura exécuté la
commande la plus à droite, il recommencera au début de la boucle.
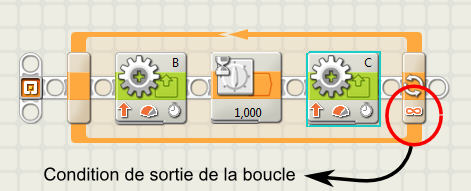
La figure ci-dessous est un exemple simple d'utilisation de la
boucle : en y entrant par la gauche, on active le moteur B
pendant une seconde, puis on attend une seconde, et on active le
moteur C pendant une seconde. Puis la boucle recommence.
A vous de jouer : programmez le robot pour qu'il tourne en carré : avancer 3 secondes, tourner à angle droit, avancer 3 secondes, tourner à angle droit, etc ...
Quelques petits réglages sont nécessaires.
Tourner en spirale
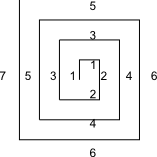
On voudrait maintenant faire tourner le robot en spirale, comme sur
le schéma de la figure ci-contre : avancer une seconde, puis
tourner de 90 degrés, avancer encore une seconde, puis tourner de 90
degrés, avancer deux secondes, tourner, etc.
Comment indiquer au robot de suivre ce comportement ? Il faudrait lui dire :
- Fixe une longueur initiale n à 1.
- Avance d'une distance n.
- Tourne à 90 degrés.
- Avance de la même distance n.
- Augmente n de une unité.
- Recommence au point 2.
Le déroulement de ces instructions, du point 2 au point 6 correspond au fonctionnement de la boucle dont on vient de parler. Il faudrait juste avoir un bloc mémorisant la valeur actuelle de n, et un ou plusieurs autre blocs qui permettraient d'ajouter 1 à cette valeur.
Les boîtes nécessaires existent, elles sont dans le menu des
données :
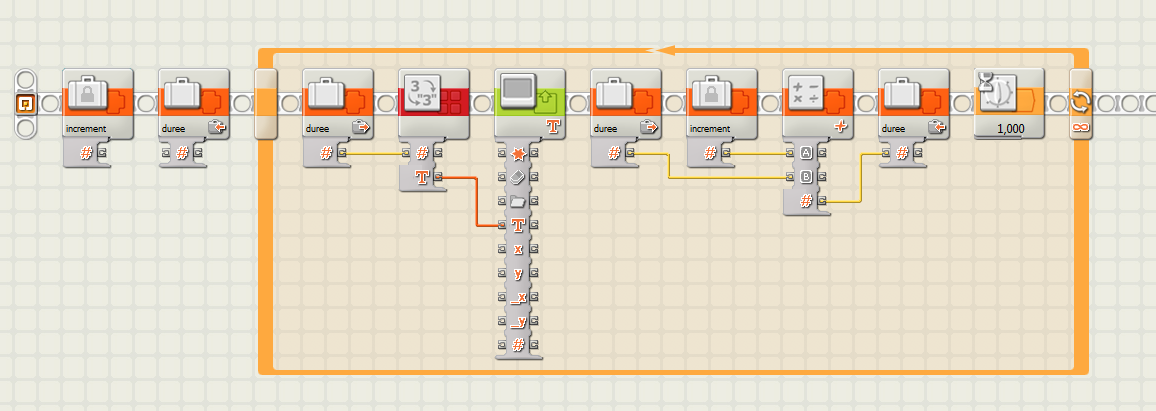
Le petit programme suivant peut vous aider à
comprendre comment les utiliser :
On a créé une variable (c'est-à dire un endroit pour stocker une valeur numérique) qui s'appelle durée : pour cela on va dans le menu Modifier->Définir des variables->Créer, puis on choisit le type numérique, et le nom de la variable). De la même façon, on crée une constante (valeur numérique qui ne changera jamais).
Ensuite commence la boucle :
- Les trois premiers blocs servent à afficher la valeur courante de
la variable durée sur l'écran de la brique :
- lire la valeur de la variable.
- transformer le nombre en mot : l'écran ne comprend que les chaînes de caractères.
- afficher le texte sur l'écran.
- Les quatre blocs suivants changent la valeur de la variable durée :
- on va chercher la valeur actuelle de la variable.
- on va chercher la valeur de la constante.
- on utilise un bloc addition pour calculer la somme de ces deux valeurs.
- on range le résultat dans la variable.
- Enfin, on place un bloc de temporisation, sinon l'affichage avance trop vite.
Testez ce programme jusqu'à en avoir bien compris le fonctionnement.
Pour demander au moteur d'avancer pendant une durée variable, il faut
entrer la valeur voulue dans le bloc déplacer. Pour
cela, cliquez sur le côté bas du bloc : une série de plots se
déplie comme ci-dessous. Branchez alors votre variable sur le plot durée.
Programmez et tester la progression en spirale du robot.
Réagir à l'environnement
Les robots décrits jusqu'à maintenant fonctionnent comme des
automates : ils font ce qu'on leur demande, mais ne prennent jamais
de décisions, aussi simples soient-elles. En ajoutant des capteurs
à un robot, on lui permet de percevoir son environnement. Si on peut
le programmer pour que son comportement dépende de cette perception,
on obtient une machine un peu plus intelligente. Le degré
d'intelligence dépend de l'acuité de ses sens, et de la puissance de
calcul qu'il utilisera pour prendre ces décisions.
Pour permettre au robot de percevoir son environnement, nous avons
à notre disposition plusieurs types de capteurs :
- des capteurs tactiles : le robot peut voir si ces interrupteurs sont enfoncés; on s'en sert pour savoir si on a heurté un obstacle, par exemple.
- des capteurs sonores : les oreilles du robot (tous les robots utilisés durant le stage n'ont pas de tels capteurs).
- des capteurs à ultrasons : ils permettent de calculer des distances.
- des capteurs photosensibles et capteurs de couleur : les yeux du robot.
- d'autres capteurs peuvent connaître l'état des moteurs, on peut les comparer aux nerfs qui nous renseignent sur le fonctionnement de nos muscles.
Application simple
Essayer de concevoir un programme ordonnant au robot d'aller tout
droit jusqu'au moment où il heurte un obstacle, et lui demander
alors :
- de s'arrêter.
- de reculer.
- de se remettre en marche.
Un peu plus dur (quoi que ...)
Programmer le robot pour qu'il avance tout droit jusqu'à ce qu'il perçoive la présence
d'un obstacle à moins de 5 cm. Il tourne alors de 90 degrés, et se
remet en route.
Quelques indices :
- les exemples de boucles que nous avons vus jusqu'à présent
étaient des boucles infinies. On peut aussi indiquer que la boucle
doit s'arrêter lorsqu'une condition est remplie : cliquez sur
le symbole de l'infini à droite d'un bloc de boucle (voir
la figure de boucle). Vous pouvez alors fixer une condition d'arrêt dépendant des informations fournies par un capteur.
- rien n'interdit d'avoir une boucle "à l'intérieur" d'une autre...
Nettement plus dur... mais pas infaisable
Le robot se promène dans un environnement parsemé
d'obstacles. Lorsqu'il perçoit un obstacle dans la direction de son
déplacement à moins de 5 cm, il change de direction jusqu'à temps
qu'il constate que la voie est libre devant lui. Il se remet alors à
avancer. Programmez ce comportement.
Et si on l'autorisait à changer parfois de direction comme ça, sans raison, au hasard ?